


Zkoumání role LiDAR v autonomních mobilních robotech (AMR)
Co je 2D TOF LiDAR a jak funguje v AMR?
2D TOF LiDAR
2D TOF LiDAR (Two-Dimensional Time of Flight LiDAR) je laserový radarový systém založený na principu Time of Flight (TOF) používaný pro dvourozměrná prostorová měření. Funguje tak, že vysílá laserový paprsek směrem k cíli a měří čas, který trvá, než se laser vyzáří, odrazí od cíle a vrátí se (tj. čas letu), aby se přesně vypočítala vzdálenost mezi cílem a LiDAR. Odražený signál po zpracování poskytuje informaci o vzdálenosti cíle. Začleněním skenovacího mechanismu LiDAR (jako je rotující zrcadlo nebo lineární skenování) může systém dále určit polohu cíle (tj. azimut) ve dvourozměrné rovině.
Autonomní mobilní roboty (AMR)
Když se mluví o AMR, lidé často myslí na další související koncept - AGV.
AGV, což je zkratka pro „Automated Guided Vehicle“, je typ vozidla, které se může automaticky pohybovat po předem definované vodicí dráze, obvykle používané pro pomoc při přepravě předmětů. AGV sledují nastavenou vodící dráhu, a pokud během pohybu narazí na překážku, zastaví se a počkají, dokud překážka nebude odstraněna, než budou pokračovat po předem nastavené dráze k dokončení přepravního úkolu.
AMR, což je zkratka pro „Autonomous Mobile Robot“, dosahuje bezkolejového pohybu prostřednictvím autonomní navigace a často může být vybaveno robotickými rameny pro zlepšení možností manipulace s předměty. AMR mohou v reálném čase porovnávat svou aktuální dráhu pohybu s předem uloženou mapou. Pokud se během pohybu objeví překážka, systém okamžitě přepočítá nejlepší trasu, jak se překážce vyhnout a dosáhnout určeného místa.
Mezi běžné metody autonomního pohybu pro AMR patří navigace LiDAR (LiDAR SLAM) a vizuální navigace (Visual SLAM). Tento článek se zaměří na navigaci LiDAR pro AMR.
LD-05D 2D TOF LiDAR
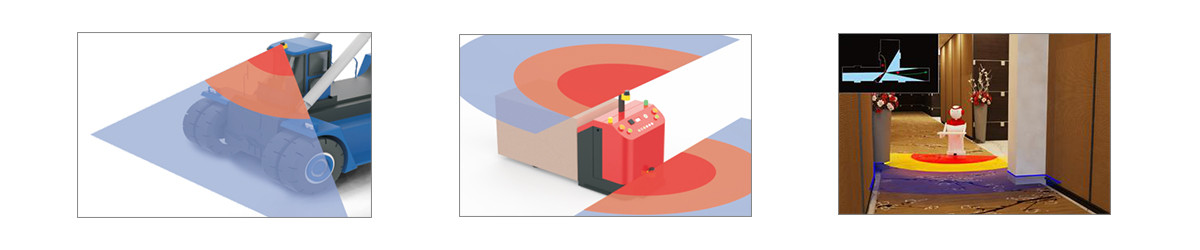
DADISICK LD-05D 2D TOF LiDAR je vybaven samoučící funkcí, která uživatelům umožňuje nastavit pracovní oblast pomocí softwaru "LD Designer". Stisknutím a podržením tlačítka „samoučení“ po dobu 3 sekund se zařízení přepne do režimu samoučení. V tomto režimu 2D LiDAR provádí horizontální laserové skenování, aby rychle zachytil 2D obrysové informace prostředí obklopujícího robota, pomocí naskenovaného obrysu definuje hranice pracovní oblasti.
Klíčové funkce 2D TOF LiDAR v systémech AMR
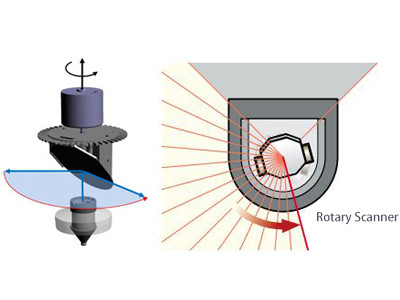
Radarové skenování:
2D LiDAR snímá horizontální rovinu vysíláním laserových paprsků a přijímáním signálů odražených od okolních objektů. Tyto signály se používají k měření vzdálenosti a úhlu (obvykle azimutu) mezi objekty a radarem.
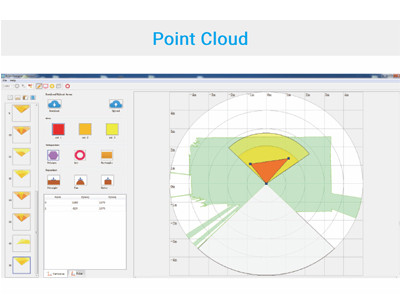
Generování mračna bodů:
Během procesu skenování jsou datové body shromážděné radarem (vzdálenost a úhel) převedeny na mračno bodů ve 2D souřadnicovém systému. Tyto datové body mračna bodů představují polohy a tvary objektů v rovině skenování radaru.
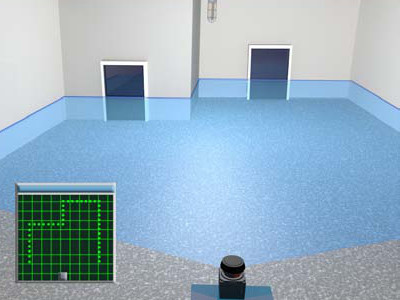
Konstrukce mapy:
Na základě dat mračna bodů lze vygenerovat 2D mapu prostředí. Tato mapa může být ve formě mapy obsazenosti, kde každá buňka mřížky představuje malou oblast prostředí a je označena buď jako volná (splavná), obsazená (obstrukce) nebo neznámá na základě radarových dat.
Autonomní navigace
Pro AMR vybavené 2D LiDAR se obvykle používají algoritmy vhodné pro 2D prostředí, jako je gmapping, hector, karto a cartographer. Tyto algoritmy využívají data poskytovaná 2D LiDAR pro konstrukci map a lokalizaci robotů.
Během procesu SLAM využívá AMR environmentální data zachycená 2D LiDAR v kombinaci s algoritmy SLAM k postupnému vytváření 2D mapy pracovního prostředí. Tato mapa obsahuje nejen umístění překážek, ale může také obsahovat zdi, chodby a další charakteristiky prostředí.
S počáteční mapou a environmentálními daty v reálném čase může AMR dosáhnout přesnější lokalizace pomocí algoritmů SLAM. Na základě vytvořené mapy může AMR provést plánování cesty, vybrat optimální trasu pro vyhnutí se překážkám a dosažení cílového místa.
Když nastanou změny prostředí (například se objeví nové překážky nebo jsou zablokovány cesty), AMR použije 2D LiDAR data a SLAM algoritmy k aktualizaci mapy a přeplánování trasy. Prostřednictvím tohoto dynamického adaptačního mechanismu AMR udržuje nepřetržitou a stabilní autonomní navigaci.
Úvahy:
Vzhledem k tomu, že 2D LiDAR snímá pouze v horizontální rovině, nemůže poskytnout informace o výšce překážek, což by mohlo v některých situacích omezit navigační schopnosti AMR, zejména když výška překážky významně ovlivňuje průchodnost robota. V mnoha scénářích pohybu 2D roviny (jako jsou vnitřní prostředí a rovné venkovní plochy) však 2D LiDAR stačí pro potřeby mapování a navigace.
Integrace 2D TOF LiDAR s dalšími senzory a budoucí trendy
LiDAR lze také integrovat s dalšími senzory, jako jsou kamery a ultrazvukové senzory, aby se zlepšil celkový výkon AMR. Například v systému pro předcházení kolizím AMR mohou ultrazvukové senzory doplňovat LiDAR tím, že zlepšují schopnost robota detekovat objekty s nízkou odrazivostí a přizpůsobovat se specifickým podmínkám prostředí. Navíc ve scénářích vyžadujících detekci na blízko, jako jsou mezery mezi robotem a policemi, mohou ultrazvukové senzory hrát klíčovou roli.
Vzdálenost 5 m, Technika, která využívá laserový paprsek k měření vzdálenosti a vytváření podrobných map objektů a prostředí.

Dosah snímání 20m, Technika, která využívá laserový paprsek k měření vzdálenosti a vytváření podrobných map objektů a prostředí.

Detekční rozsah: 30-300 mm, 50-500 mm, 60-1000 mm Materiál: měď niklování, plastové fitinky Typ připojení: 5pinový konektor M12

Detekční rozsah: 100-2000 mm, 200-4000 mm, 350-6000 mm Materiál: měď poniklování, plastové fitinky Typ připojení: 5pinový konektor M12
